top of page
Particle Filter for Robot Localization
Implemented Particle Filter/Monte Carlo Localization to localize a lost robot in an indoor environment. Implemented robot motion model, sensor model and ray tracing algorithm for successful 2D localization of the robot.
Monte Carlo Localization (MCL), a popular localization algorithm, is essentially the application of particle filter for mobile robot localization.
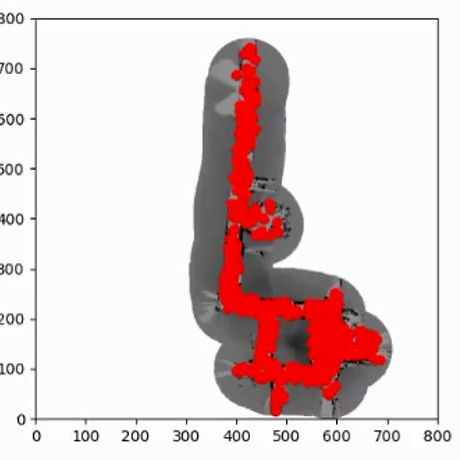
In the video each particle represents a robot pose hypothesis which for a 2D localization case includes the (x, y) position and orientation θ of the robot. The Prediction and Correction Steps are derived from robot motion and sensor models respectively.
Prediction Step: Updating particle poses by sampling particles from the motion model.
Correction Step: Computing an importance weight for each particle as the ratio of target and proposal distributions. This reduces to computing weights using the sensor model.
Resampling Step: Resampling particles for the next time step with probabilities proportial to their importance weights
bottom of page